中国知网全文收录
- 投稿邮箱:kxjscx@kxjscxzzs.com
- 在线编辑QQ:959914545
中国知网全文收录

主管单位:黑龙江省科学技术协会
主办单位:黑龙江省科普事业中心
编辑出版:《科学技术创新》编辑部
国际标准刊号:ISSN 2096-4390
国内统一刊号:CN 23-1600/N
邮发代号:14-119
语 言:中文
周 期: 月刊
出 版 地:黑龙江省哈尔滨市
语 种: 中文
开 本: 16开
投稿邮箱 :kxjscx@kxjscxzzs.com
在线编辑QQ :959914545
发布时间:2021-01-08 阅读数:398

摘? 要:使用SVM对LiDAR数据中进行分类,在进行分类的过程中,采用了样本交叉验证和LIBSVM中的网格法两种方法对SVM的参数进行了讨论。首先,先对LiDAR数据进行预处理;其次,通过两种方法进行SVM分类参数的获取;最后,通过精度的比较及分类结果的目视对比,分析参数选取方法,选取适宜的参数选取方法。
关键词:LiDAR? SVM? 样本交叉验证? LIBSVM? 格网法? SVM分类参数? 分类提取
中图分类号:TP181 ? ?文献标识码:A 文章编号:1672-3791(2019)08(a)-0045-02
机载激光雷达(LiDAR)作为新型的遥感技术,越来越受到人们的重视与使用;它能快速地采集地面点的空间信息与反射强度信息;利用它所提供的信息数据,我们能够对地面物体进行分类,并提取出人们感兴趣或特殊的地物做进一步的分析与利用。
而在LiDAR数据的众多分类方法中,支持向量机(SVM)的使用较为广泛,且分类精度较高。但由于该方法中存在分类参数的设置,使得分类结果十分依赖于参数优劣,可以说参数的选择对分类结果有着至关重要的作用。所以,针对分类内容,如何选取适宜的SVM分類参数是一个值得研究的问题。
在过去诸多利用SVM进行LiDAR数据分类的研究中,它们有的对SVM的分类参数进行了一些说明,有的并未给出明确的选择过程。例如,Mingjun Song和Daniel Civco(2004)在使用SVM对道路进行提取时使用了LIBSVM对参数进行选取[1];Zahra Azizi(2014)等人在对森林道路进行提取时对SVM参数未具体说明[2];乔纪纲(2013)等人在对地物的提取中利用LIBSVM进行选取[3]。该文基于前人的研究之上,就SVM参数的选择进行了进一步研究。
1? SVM参数研究方法
该文使用了SVM对LiDAR数据中的强度信息进行了分类。在进行分类的过程中,采用了样本交叉验证和LIBSVM中的网格法两种方法对SVM的参数进行了讨论,通过精度的比较及分类结果的目视对比,对参数选取方法进行分析。技术流程如图1所示。
1.1 数据预处理
先对LiDAR点云强度信息数据进行直方图统计,根据直方图去掉太高或者太低的噪声。再选取末次回波作为地面观测信息,进行栅格化。最后使用临近填充的方法对数据空洞进行填补,得到强度信息图像[4,5]。
1.2 使用不同参数获取方法进行分类
利用分类样本进行分类参数的选取:第一种,将分类样本随机分为两等份,一份用于训练分类器,一份用于检验分类器精度,利用遍历法,步长为1,寻找分类精度最优的分类参数C(惩罚因子)。第二种,利用LIBSVM中的格网法进行寻找最优参数C。
1.3 对分类结果进行对比
使用样本交叉验证和格网法所得到参数C分别对本文强度信息进行分类,得出两种方法的分类精度及分类图像,通过精度与图像的对比,进行对参数选取方法的评价。
2? 实验与结果分析
为了更好地突出分类结果,实验数据要求应简洁明了,且易于区分,能提供较为明显的地物作为分类提取的目标物。为了满足实验数据的要求,该文选择了Open Topography Facility在Andrews Experimental Forest和Willamette National Forest地区的LiDAR点云数据。该数据区域面积为0.25km2,其中包含一条明显的道路,在分类过程中只需将分类目标设置为道路,就能明显观察到分类结果的优劣。
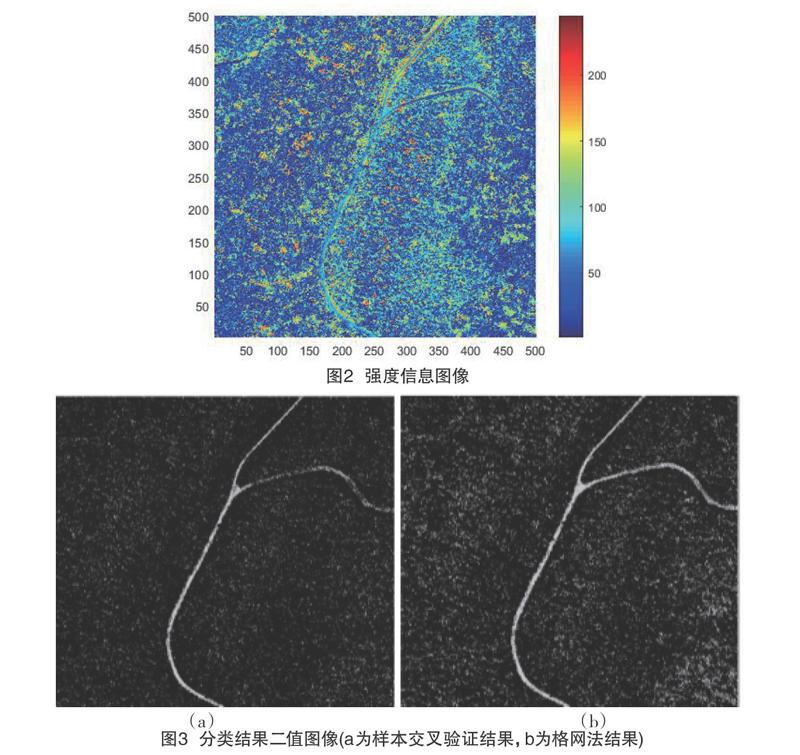
对点云数据进行预处理后,得到强度信息图像,如图2所示。
根据强度信息图像与正射影像图,选取了40个道路点与1050个非道路点作为分类的样本信息。先对样本信息进行样本交叉验证运算,得到最优分类参数C为55,分类器先验精度(道路点被正确提取的精度)为82%,分类结果二值图如图3所示。再利用SVM中格网法进行参数C的选取,参数C结果为0.0039,分类精度为96%,分类结果二值图如图3所示。
由两种分类方法的分类精度可知,格网法得出的参数C对样本分类结果有较高的分类精度,从二值图像上可以看得出,相比于a,b对道路信息的保留更多。但是b相对于a存在更多的噪声,且噪声面积较大,对后期的图像处理带来了麻烦。虽然a的道路信息不如b完善,但提取出了道路的大部分信息,体现了道路的主要结构与空间信息,且剩余噪声多为小面积离散噪声,方便进行后期处理。
经过试验证明,在该文对LiDAR点云数据进行SVM分类的过程中,选择样本交叉验证得出的参数C更适合对道路空间结构的提取,而格网法得出的参数C更能体现道路细节信息。在实际应用中,可综合考虑对分类目的要求,选取适宜的参数获取方式。
3? 结语
该文在对LiDAR点云数据的分类过程中对SVM参数C的选取进行了研究,利用了样本交叉验证与LIBSVM中的格网法两种方法进行了试验、比较。试验表明,样本交叉验证得出的参数能较好地剔除非道路点,且能保留较完整的道路信息;格网法对道路点的提取精度高,但对噪声的剔除能力较差。所以,在实际应用中对SVM参数的选择,应针对应用要求及分类目标进行综合考虑,选择适宜的参数选取方法。同时,该研究仍存在一定的不足:实验对应的分类类别过少;样本数据较少,缺少大量对照组。希望后来的研究能丰富数据,更深入地研究分类过程中的参数选取方法。
参考文献
[1] Song,M.Civco, D.Road extraction using SVM and image segmentation[J].Photogrammetric Engineering & Remote Sensing,2004(70):1365-1371.
[2] Azizi,Z.Najafi,A.Sadeghian,S.Forest Road Detection Using LiDAR Data[J].Journal of Forestry Research,2014(25):975-980.
[3] 乔纪纲,陈明辉,艾彬,等.SVM用于LiDAR数据的地物分类[J].测绘通报,2013(7):35-38,42.
[4] 胡澄宇,汪仁银,张金花,等.一种基于机载LiDAR点云的林间道路提取方法[J].测绘工程,2017,26(12):60-63,75.
[5] 胡澄宇.基于机载LiDAR的林间道路提取方法研究[D].西南交通大学,2016.
编辑整理:科学技术创新杂志社编辑部 官方网站:www.hljkxzzs.com